
Robot Mira Laser Shoot HC-SR04
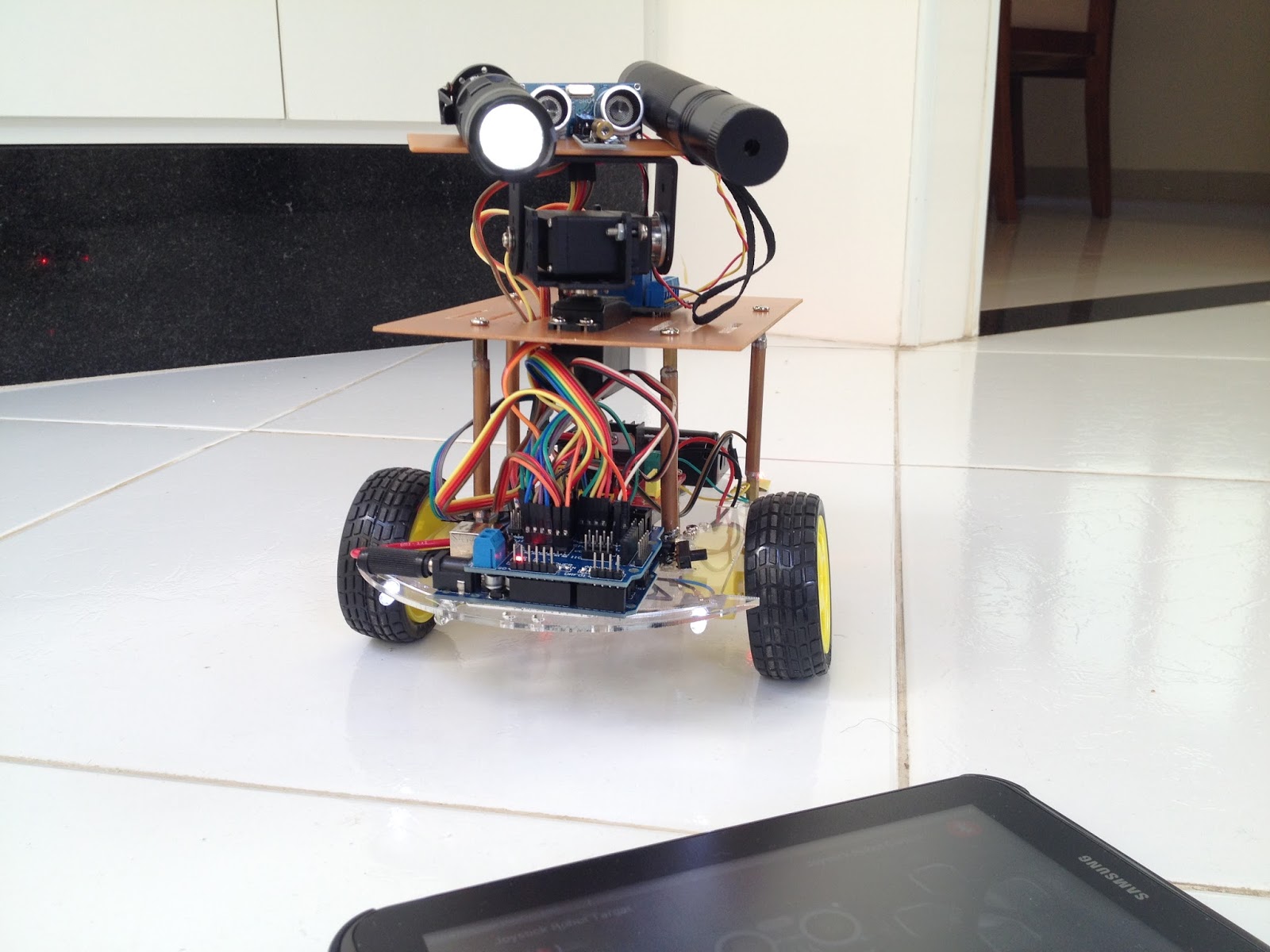
Robô com Joystick1 todas as direções, Joystick2 com Radar, 2 Servos Motores, Mira Laser(Laser Vermelho), Lanterna Led Cree Q 5W, Laser Verde High Power Burn e Sensor ultrassônico para leitura de distância em cm com o HC-SR04.
Código para Arduino Uno r3 - Gratuito!
SWITCHES - CONTROLE ON/OFF DE 8 CANAIS:
Código para Arduino Uno r3 - Gratuito!
SWITCHES - CONTROLE ON/OFF DE 8 CANAIS:
- Efeitos de Luz, Som e Laser podem ser adicionados, pois estes são importantes quando o Robô participa de eventos e demonstrações públicas em feiras de ciências.
Robot Mira Laser Shoot HC-SR04
Google Play: https://play.google.com/store/apps/details?id=appinventor.ai_antoniosergiosouzaalmeida.RobotMiraLaserShootHCSR04&hl=pt_BR
Veja no meu canal Youtube:
Icone de Apresentação:


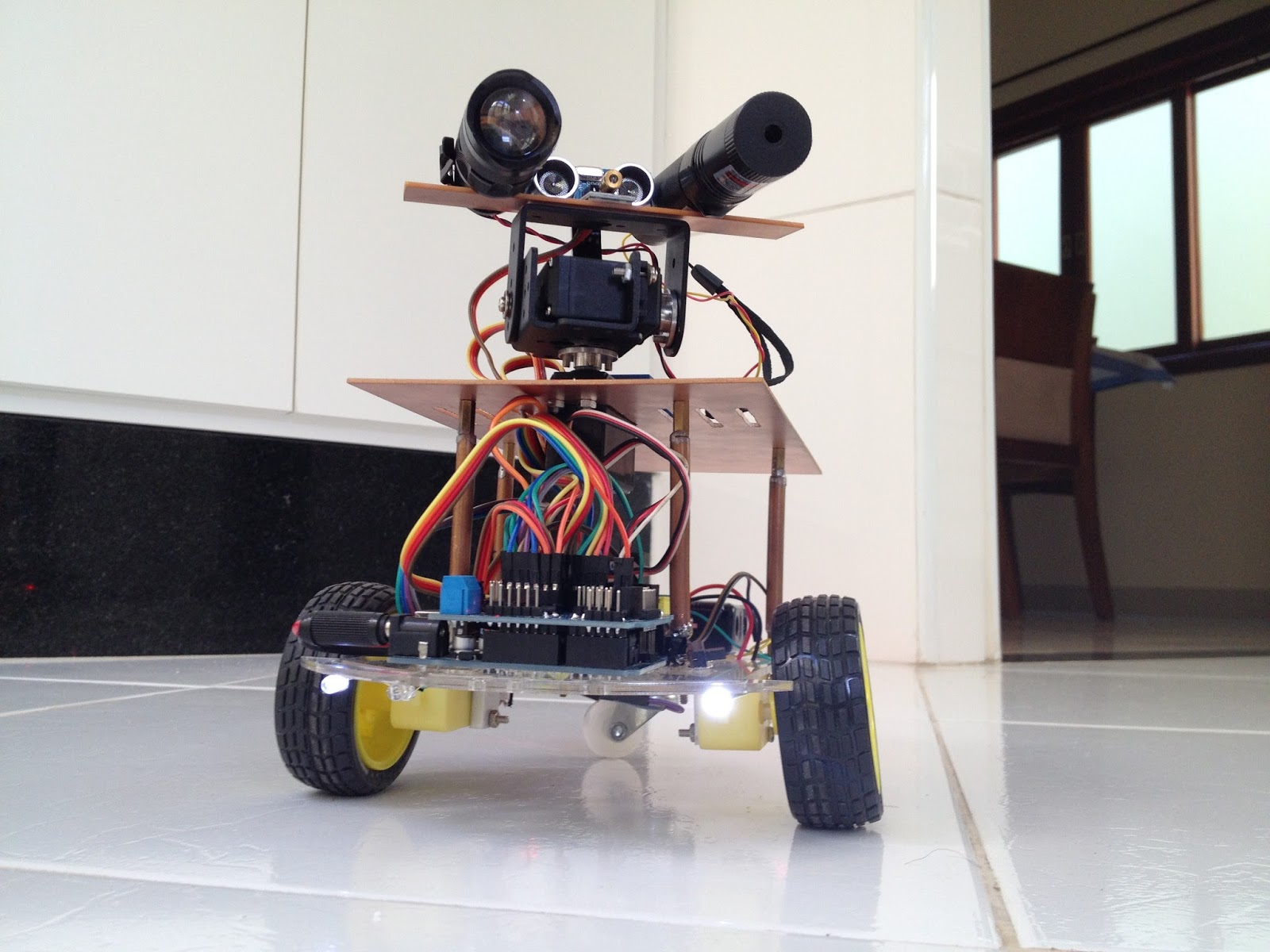
Atenção para montagem o robô funciona normalmente apenas com os esquemas das partes 4 e 5, onde se encontram a placa Arduino, Bluetooth, Ponte H, Motores e Bateria(BAIXO CUSTO).
Os esquemas das partes 1 , 2 e 3 são acessórios opcionais que deixam seu robô muito mais interessante como Laser Vermelho, Laser Verde, Lanterna Led, Sensor HC-SR04, Farol, Luz Interna, Lanterna, Buzina e todos os outros acessórios restantes conforme mostra as figuras.
Esquema Robô Part1:
 Esquema Robô Part2:
Esquema Robô Part2:
 Esquema Robô Part3:
Esquema Robô Part3:

Esquema Robô Part4:

Esquema Robô Part5:

Esquema Robô Part4:
Conteúdo:
1)- Descrição de Funcionamento;
2)- Comandos utilizados e pinagem do Arduino;
3)- Fotos do aplicativo;
3.1)- Fotos do aplicativo funcionando com tablet Samsung;
4)- Código Arduino Uno r3: Robot Total Control 23 Channels;
5)- Lista de Materiais;
6)- Esquema de ligações;
1)- Descrição de Funcionamento:
JOYSTICK1 ROBOT CONTROL - CONTROLE TOTAL dos motores com 8 movimentos:
1)-Ir para Frente;
2)-Ir para Traz;
3)-Girar no próprio Eixo para a Esquerda;
4)-Girar no próprio Eixo para a Direita;
5)-Ir para Frente Girando para a Esquerda(curva aberta);
6)-Ir para Frente Girando para a Direita(curva aberta);
7)-Ir para Traz Girando para a Esquerda(curva aberta);
8)-Ir para Traz Girando para a Direita(curva aberta);
JOYSTICK2 ROBOT TARGET - CONTROLE TOTAL 8 movimentos DO ALVO COM 2 SERVO MOTORES:
1)- Controle de 2 servo motores para posicionamento do alvo com MIRA LASER;
2)- Aciona LASER VERMELHO(POINT SHOOTING);
3)- Aciona LASER VERDE(BURN, FIRE, POINT SHOOTING);
4)- Mostra no Display a posição exata do ALVO com MIRA LASER;
5)- Aciona POWER LED CREE Q-5W led - farol de potência com led 5W;
6)- Mostra a distância do alvo através da leitura do sensor HC-SR04;
SWITCHES - CONTROLE ON/OFF DE 8 CANAIS:
1)- Farol: Frontal Light Button icon Blue Light;
2)- Lanterna traseira: Back Light Button icon Yellow Light;
3) -Luz interna: Internal Light Button icon Green Light;
4)- Buzina: Horn Button icon White horn(Pressione para acionar e solte para desligar);
5)- LASER VERMELHO 5mW: Button icon laser red(POINT SHOOTING);
6)- LASER VERDE 2000mW: Button icon laser green(BURN, FIRE, POINT SHOOTING);
7)- POWER LED CREE Q-5W: Button icon led white;
8)- HC-SR04: Button icon ultrasonic blue;
Todos os 8 canais podem ser modificados para qualquer outro acionamento, conforme sua necessidade, possibilitando uma grande combinação de controles de sua preferência.
Como Funciona o Robot Mira Laser Shooting HC-SR04:
Trabalhar com 2 Joystics onde Joystic1 controla o Robô com todos seus movimentos e Joystic2 controla 2 servo motores com Mira Laser onde podemos visualizar a posição e distância do objeto, contamos também com controles direcionais para uma Lanterna de potência de Led 5W e Laser Verde para efetuar um disparo e queimar(burn) o objeto alvo em questão(opcional);
Controle com 8 canais individuais ON/OFF para acionamentos diversos;
Atenção: Cuidado ao trabalhar com Laser pois este pode provocar ferimentos quando atingir a pele ou olhos. Use sempre óculos de proteção e nunca faça mira em pessoas ou animais.
O aplicativo Android se conecta com o Arduino via bluetooth. Então quando pressionamos por exemplo o botão para o Robô ir para frente, o App envia um caractere "F" este caractere é interpretado pelo Arduino através de seu código(fornecido gratuitamente) e envia sinal para a placa de com o Driver Ponte H onde será feito o acionamento de potencia dos motores; Neste caso exemplo comando Ir para Frente os dois motores serão acionados no mesmo sentido de rotação que dará propulsão para o Robot Ir para Frente.
Exemplo Ir para Traz os dois motores também serão acionados mas neste caso em sentido de rotação contrário ao exemplo acima o que fará com que o Robô ande para Traz.
Mantendo a mesma analogia quando o Robô Gira no Eixo significa que um motor é acionado no sentido horário e outro no sentido anti horário e assim por diante.
Toda esta operação fica por conta do App. Robot Mira Laser Shoot HC-SR04 com o Código Arduino.
VEJA TAMBÉM:
PROGRAMA CÓDIGO ARDUINO COMPLETO;
ESQUEMA DE LIGAÇÕES COM LEDS;
ESQUEMA DE LIGAÇÕES COM MÓDULOS DE RELÉS;
LISTA DE MATERIAIS;
FOTOS E VÍDEOS;
DESCRIÇÃO DE FUNCIONAMENTO;
DESCRIÇÃO DE TODOS OS COMANDOS E PINAGENS DO ARDUINO;
2)- COMANDOS UTILIZADOS E PINAGEM ARDUINO:
TELA DO APP. E COMANDOS.

1)-Ir para Frente;
2)-Ir para Traz;
3)-Girar no próprio Eixo para a Esquerda;
4)-Girar no próprio Eixo para a Direita;
5)-Ir para Frente Girando para a Esquerda(curva aberta);
6)-Ir para Frente Girando para a Direita(curva aberta);
7)-Ir para Traz Girando para a Esquerda(curva aberta);
8)-Ir para Traz Girando para a Direita(curva aberta);


SWITCHES - CONTROLE ON/OFF DE 8 CANAIS:
1)- LASER VERMELHO 5mW: Button icon laser red(POINT SHOOTING);
2)- LASER VERDE 2000mW: Button icon laser green(BURN, FIRE, POINT SHOOTING);
3)- POWER LED CREE Q-5W: Button icon led white;
4)- HC-SR04: Button icon ultrasonic blue;
5)- Farol: Frontal Light Button icon Blue Light;
6)- Lanterna traseira: Back Light Button icon Yellow Light;
7) -Luz interna: Internal Light Button icon Green Light;
8)- Buzina: Horn Button icon White horn(Pressione para acionar e solte para desligar);
TELA REFERÊNCIA DOS CARACTERES ENVIADOS VIA BLUETOOTH PELO APP.

TELA REFERÊNCIA DA PINAGEM ARDUINO UNO R3:

SWITCHES - CONTROLE ON/OFF DE 8 CANAIS:
1)- LASER VERMELHO 5mW: Button icon laser red(POINT SHOOTING);
2)- LASER VERDE 2000mW: Button icon laser green(BURN, FIRE, POINT SHOOTING);
3)- POWER LED CREE Q-5W: Button icon led white;
4)- HC-SR04: Button icon ultrasonic blue;
5)- Farol: Frontal Light Button icon Blue Light;
6)- Lanterna traseira: Back Light Button icon Yellow Light;
7) -Luz interna: Internal Light Button icon Green Light;
8)- Buzina: Horn Button icon White horn(Pressione para acionar e solte para desligar);
PINAGEM ARDUINO UNO:
CODE - ARDUINO UNO R3 - OUTPUT PINS:
A0 - Farol: Frontal Light Button icon Blue Light;
A1 - Lanterna trazeira: Back Light Button icon Yellow Light;
A2 - Luz Interna: Internal Light icon Green Light;
A3 - Buzina: Horn Button icon White horn;
A4 - Red Laser Target Point;
A5 - Green Laser Target Shooting;
D0 - N/C;
D1 - N/C;
D2 - PINO_TRIGGER HC-SR04;
D3 - SERVO1;
D4 - CONTROL INVERTER MOTOR1;
D5 - CONTROL PWM MOTOR1;
D6 - CONTROL PWM MOTOR2;
D7 - CONTROL INVERTER MOTOR2;
D8 - PINO_ECHO HC-SR04;
D9 - Led Light High Power:Led Cree Q5 - 5W;
D10 - N/C;
D11 - SERVO2;
D12 - TX BLUETOOTH;
D13 - RX BLUETOOTH;
1)- Descrição de Funcionamento;
2)- Comandos utilizados e pinagem do Arduino;
3)- Fotos do aplicativo;
3.1)- Fotos do aplicativo funcionando com tablet Samsung;
4)- Código Arduino Uno r3: Robot Total Control 23 Channels;
5)- Lista de Materiais;
6)- Esquema de ligações;
1)- Descrição de Funcionamento:
JOYSTICK1 ROBOT CONTROL - CONTROLE TOTAL dos motores com 8 movimentos:
1)-Ir para Frente;
2)-Ir para Traz;
3)-Girar no próprio Eixo para a Esquerda;
4)-Girar no próprio Eixo para a Direita;
5)-Ir para Frente Girando para a Esquerda(curva aberta);
6)-Ir para Frente Girando para a Direita(curva aberta);
7)-Ir para Traz Girando para a Esquerda(curva aberta);
8)-Ir para Traz Girando para a Direita(curva aberta);
JOYSTICK2 ROBOT TARGET - CONTROLE TOTAL 8 movimentos DO ALVO COM 2 SERVO MOTORES:
1)- Controle de 2 servo motores para posicionamento do alvo com MIRA LASER;
2)- Aciona LASER VERMELHO(POINT SHOOTING);
3)- Aciona LASER VERDE(BURN, FIRE, POINT SHOOTING);
4)- Mostra no Display a posição exata do ALVO com MIRA LASER;
5)- Aciona POWER LED CREE Q-5W led - farol de potência com led 5W;
6)- Mostra a distância do alvo através da leitura do sensor HC-SR04;
SWITCHES - CONTROLE ON/OFF DE 8 CANAIS:
1)- Farol: Frontal Light Button icon Blue Light;
2)- Lanterna traseira: Back Light Button icon Yellow Light;
3) -Luz interna: Internal Light Button icon Green Light;
4)- Buzina: Horn Button icon White horn(Pressione para acionar e solte para desligar);
5)- LASER VERMELHO 5mW: Button icon laser red(POINT SHOOTING);
6)- LASER VERDE 2000mW: Button icon laser green(BURN, FIRE, POINT SHOOTING);
7)- POWER LED CREE Q-5W: Button icon led white;
8)- HC-SR04: Button icon ultrasonic blue;
Todos os 8 canais podem ser modificados para qualquer outro acionamento, conforme sua necessidade, possibilitando uma grande combinação de controles de sua preferência.
Como Funciona o Robot Mira Laser Shooting HC-SR04:
Trabalhar com 2 Joystics onde Joystic1 controla o Robô com todos seus movimentos e Joystic2 controla 2 servo motores com Mira Laser onde podemos visualizar a posição e distância do objeto, contamos também com controles direcionais para uma Lanterna de potência de Led 5W e Laser Verde para efetuar um disparo e queimar(burn) o objeto alvo em questão(opcional);
Controle com 8 canais individuais ON/OFF para acionamentos diversos;
Atenção: Cuidado ao trabalhar com Laser pois este pode provocar ferimentos quando atingir a pele ou olhos. Use sempre óculos de proteção e nunca faça mira em pessoas ou animais.
O aplicativo Android se conecta com o Arduino via bluetooth. Então quando pressionamos por exemplo o botão para o Robô ir para frente, o App envia um caractere "F" este caractere é interpretado pelo Arduino através de seu código(fornecido gratuitamente) e envia sinal para a placa de com o Driver Ponte H onde será feito o acionamento de potencia dos motores; Neste caso exemplo comando Ir para Frente os dois motores serão acionados no mesmo sentido de rotação que dará propulsão para o Robot Ir para Frente.
Exemplo Ir para Traz os dois motores também serão acionados mas neste caso em sentido de rotação contrário ao exemplo acima o que fará com que o Robô ande para Traz.
Mantendo a mesma analogia quando o Robô Gira no Eixo significa que um motor é acionado no sentido horário e outro no sentido anti horário e assim por diante.
Toda esta operação fica por conta do App. Robot Mira Laser Shoot HC-SR04 com o Código Arduino.
VEJA TAMBÉM:
PROGRAMA CÓDIGO ARDUINO COMPLETO;
ESQUEMA DE LIGAÇÕES COM LEDS;
ESQUEMA DE LIGAÇÕES COM MÓDULOS DE RELÉS;
LISTA DE MATERIAIS;
FOTOS E VÍDEOS;
DESCRIÇÃO DE FUNCIONAMENTO;
DESCRIÇÃO DE TODOS OS COMANDOS E PINAGENS DO ARDUINO;
2)- COMANDOS UTILIZADOS E PINAGEM ARDUINO:
TELA DO APP. E COMANDOS.

TOTAL CONTROL: O App. permite a movimentação do Robô em todos os sentidos com apenas Dois Motores, utilizando o sistema PWM para controle de tração independente; Veja figura abaixo.
Joystick Robot Control.
2)-Ir para Traz;
3)-Girar no próprio Eixo para a Esquerda;
4)-Girar no próprio Eixo para a Direita;
5)-Ir para Frente Girando para a Esquerda(curva aberta);
6)-Ir para Frente Girando para a Direita(curva aberta);
7)-Ir para Traz Girando para a Esquerda(curva aberta);
8)-Ir para Traz Girando para a Direita(curva aberta);

Controle para o Robô com 8 Canais independentes:
1 2 3 4 5 6 7 8

1)- LASER VERMELHO 5mW: Button icon laser red(POINT SHOOTING);
2)- LASER VERDE 2000mW: Button icon laser green(BURN, FIRE, POINT SHOOTING);
3)- POWER LED CREE Q-5W: Button icon led white;
4)- HC-SR04: Button icon ultrasonic blue;
5)- Farol: Frontal Light Button icon Blue Light;
6)- Lanterna traseira: Back Light Button icon Yellow Light;
7) -Luz interna: Internal Light Button icon Green Light;
8)- Buzina: Horn Button icon White horn(Pressione para acionar e solte para desligar);
TELA REFERÊNCIA DOS CARACTERES ENVIADOS VIA BLUETOOTH PELO APP.

TELA REFERÊNCIA DA PINAGEM ARDUINO UNO R3:

SWITCHES - CONTROLE ON/OFF DE 8 CANAIS:
1)- LASER VERMELHO 5mW: Button icon laser red(POINT SHOOTING);
2)- LASER VERDE 2000mW: Button icon laser green(BURN, FIRE, POINT SHOOTING);
3)- POWER LED CREE Q-5W: Button icon led white;
4)- HC-SR04: Button icon ultrasonic blue;
5)- Farol: Frontal Light Button icon Blue Light;
6)- Lanterna traseira: Back Light Button icon Yellow Light;
7) -Luz interna: Internal Light Button icon Green Light;
8)- Buzina: Horn Button icon White horn(Pressione para acionar e solte para desligar);
CODE - ARDUINO UNO R3 - OUTPUT PINS:
A0 - Farol: Frontal Light Button icon Blue Light;
A1 - Lanterna trazeira: Back Light Button icon Yellow Light;
A2 - Luz Interna: Internal Light icon Green Light;
A3 - Buzina: Horn Button icon White horn;
A4 - Red Laser Target Point;
A5 - Green Laser Target Shooting;
D0 - N/C;
D1 - N/C;
D2 - PINO_TRIGGER HC-SR04;
D3 - SERVO1;
D4 - CONTROL INVERTER MOTOR1;
D5 - CONTROL PWM MOTOR1;
D6 - CONTROL PWM MOTOR2;
D7 - CONTROL INVERTER MOTOR2;
D8 - PINO_ECHO HC-SR04;
D9 - Led Light High Power:Led Cree Q5 - 5W;
D10 - N/C;
D11 - SERVO2;
D12 - TX BLUETOOTH;
D13 - RX BLUETOOTH;
3)- Imagem do aplicativo:

3.1)- Fotos do aplicativo funcionando com tablet Samsung:










4)- Código Arduino: Robot Mira Laser Shoot HC-SR04
/*
-------------------------------------------------------------------------------
APP. - Robot Mira Laser Shoot HC-SR04.
Joystick1 to 8 directions total control to 2 motors;
Joystick2 to control for all directions with 2 servos, red laser,
green laser, led flashlight and ultrasonic sensor HC-SR04.
Monitor with the target position of the 2 servo motors;
Reading in Cm HC-sensor SR04;
More 8 channels available example:
A0-Lighthouse: Light Blue Light Front Button icon;
A1-rear Lantern: Back Light Button icon Yellow Light;
A2-interior light: Internal Light icon Green Light;
A3-Horn: Horn Button icon White horn;
A4-Red Laser Target Point;
A5-Green Laser Target Shooting;
D9-Light High Power Led: Led Cree Q5-5W;
Channel to Capturing Values of HC-SR04 Sensor;
CODE - ARDUINO UNO R3 - OUTPUT PINS:
A0 - Farol: Frontal Light Button icon Blue Light;
A1 - Lanterna trazeira: Back Light Button icon Yellow Light;
A2 - Luz Interna: Internal Light icon Green Light;
A3 - Buzina: Horn Button icon White horn;
A4 - Red Laser Target Point;
A5 - Green Laser Target Shooting;
D0 - N/C;
D1 - N/C;
D2 - PINO_TRIGGER HC-SR04;
D3 - SERVO1;
D4 - CONTROL INVERTER MOTOR1;
D5 - CONTROL PWM MOTOR1;
D6 - CONTROL PWM MOTOR2;
D7 - CONTROL INVERTER MOTOR2;
D8 - PINO_ECHO HC-SR04;
D9 - Led Light High Power:Led Cree Q5 - 5W;
D10 - N/C;
D11 - SERVO2;
D12 - TX BLUETOOTH;
D13 - RX BLUETOOTH;
-------------------------------------------------------------------------------
*/
#include <SoftwareSerial.h>
#include <Servo.h>
Servo servo1;//Movimento Horizontal;
Servo servo2;//Movimento Vertical;
SoftwareSerial mySerial(12, 13);//Arduino 12-RX(BT-Pino TX), Arduino 13-TX(BT-Pino RX);
#include <Ultrasonic.h>
//-------------------------------------------------------------------
//Define os parametros para o sensor ultrasonico HC-SR04
#define PINO_TRIGGER 2 //Porta ligada ao pino Trigger do sensor
#define PINO_ECHO 8 //Porta ligada ao pino Echo do sensor
//Inicializa o sensor ultrasonico
Ultrasonic ultrasonic(PINO_TRIGGER, PINO_ECHO);
//-------------------------------------------------------------------
int AA0 = A0;//Farol: Frontal Light Button icon Blue Light;
int AA1 = A1;//Lanterna trazeira: Back Light Button icon Yellow Light;
int AA2 = A2;//Luz Interna: Internal Light icon Green Light;
int AA3 = A3;//Buzina: Horn Button icon White horn;
int AA4 = A4;//Red Laser Target Point;
int AA5 = A5;//Green Laser Target Shooting;
int D4 = 4;//Controle Digital do motor 1;
int D5 = 5;//Controle PWM do motor 1;
int D6 = 6;//Controle PWM do motor 2;
int D7 = 7;//Controle Digital do motor 2;
int D9 = 9;//Led Light High Power:Led Cree Q5 - 5W;
int DriverR = 5;//Controle PWM dos motores 1;
int DriverL = 6;//Controle PWM dos motores 2;
int pos_X = 90;//Posição central do servo Arduino pino 3(PWM);//90
int pos_Y = 90;//Posição central do servo Arduino pino 11(PWM);//90
//------------Declaration of variables to count---------------
int conta = 0;
int contb = 0;
int contc = 0;
int contd = 0;
int conte = 0;
int contf = 0;
int contg = 0;
int contG = 0;
int conth = 0;
int conti = 0;
int contj = 0;
void setup()
{
//Serial.begin(9600);//Serial para escrita no Monitor Serial;
mySerial.begin(9600);//Serial de dados do Módulo Bluetooth;
//Serial.println("Lendo dados do sensor HC - SR04...");
pinMode (DriverL, OUTPUT);//Saída controle de direção;
analogWrite (DriverL, 0);//Controle de direção em PWM = 0;
pinMode (DriverR, OUTPUT);//Saída controle de direção;
analogWrite (DriverR, 0);//Controle de direção em PWM = 0;
pinMode(AA0, OUTPUT);
pinMode(AA1, OUTPUT);
pinMode(AA2, OUTPUT);
pinMode(AA3, OUTPUT);
pinMode(AA4, OUTPUT);
pinMode(AA5, OUTPUT);
pinMode(D4, OUTPUT);
pinMode(D5, OUTPUT);
pinMode(D6, OUTPUT);
pinMode(D7, OUTPUT);
pinMode(D9, OUTPUT);//Module Relay ON/OFF Led Light High Power;
pinMode(D9, HIGH);//Module Relay OFF Led Light High Power;
servo1.attach(3);//Servo1 ligado ao pino 3(PWM) Arduino;
servo2.attach(11);//Servo2 ligado ao pino 11(PWM) Arduino;
servo1.write(120);//Posiciona o servo para o ângulo de 90 graus;
servo2.write(140);//Posiciona o servo para o ângulo de 90 graus;
delay(1000);
servo1.write(50);//Posiciona o servo para o ângulo de 90 graus;
servo2.write(120);//Posiciona o servo para o ângulo de 90 graus;
delay(500);
servo1.write(130);//Posiciona o servo para o ângulo de 90 graus;
servo2.write(100);//Posiciona o servo para o ângulo de 90 graus;
delay(1000);
servo1.write(80);//Posiciona o servo para o ângulo de 90 graus;
servo2.write(125);//Posiciona o servo para o ângulo de 90 graus;
delay(1000);
}
void loop()
{
char caracter = mySerial.read();//Reading of the character by the serial;
//-----------Receives character and counts between 1 and 2----------
if(caracter == 'a')//Farol: Frontal Light Button icon Blue Light;
{
conta++;
if(conta>=3)
{
conta=1;
}
}
if(caracter == 'b')//Lanterna trazeira: Back Light Button icon Yellow Light;
{
contb++;
if(contb>=3)
{
contb=1;
}
}
if(caracter == 'c')//Luz Interna: Internal Light icon Green Light;
{
contc++;
if(contc>=3)
{
contc=1;
}
}
if(caracter == 'e')//Red Laser Target Point;
{
conte++;
if(conte>=3)
{
conte=1;
}
}
if(caracter == 'f')//Green Laser Target Shooting;
{
contf++;
if(contf>=3)
{
contf=1;
}
}
if(caracter == 'G')//Led Light High Power:Led Cree Q5 - 5W;
{
contG++;
if(contG>=3)
{
contG=1;
}
}
//Compares the count and triggers the digital and analogic port;
if(conta==1)
{
digitalWrite(AA0,HIGH);//ON - Farol: Frontal Light Button icon Blue Light;
}
if(conta==2)
{
digitalWrite(AA0,LOW);//OFF - Farol: Frontal Light Button icon Blue Light;
}
//----------------------
if(contb==1)
{
digitalWrite(AA1,HIGH);//ON - Lanterna: Back Light Button icon Yellow Light;
}
if(contb==2)
{
digitalWrite(AA1,LOW);//OFF - Lanterna: Back Light Button icon Yellow Light;
}
//----------------------
if(contc==1)
{
digitalWrite(AA2,HIGH);//ON - Luz Interna: Internal Light Button icon Green Light;
}
if(contc==2)
{
digitalWrite(AA2,LOW);//OFF - luz Interna: Internal Light Button icon Green Light;
}
if(caracter == 'd')//Buzina: Horn Button icon White horn;
{
digitalWrite(AA3,HIGH);
}
if(conte==1)
{
digitalWrite(AA4,HIGH);//ON - Laser Vermelho: Red Laser Target Point Button icon Red;
}
if(conte==2)
{
digitalWrite(AA4,LOW);//OFF - Laser Vermelho: Red Laser Target Point Button icon Red;
}
//----------------------
if(contf==1)
{
digitalWrite(AA5,HIGH);//ON - Laser Verde: Green Laser Target Point Button icon Green;
}
if(contf==2)
{
digitalWrite(AA5,LOW);//OFF - Laser Verde: Green Laser Target Point Button icon Green;
}
//----------------------
if(contG==1)
{
digitalWrite(D9,LOW);//ON - Led Light High Power: Led Cree Q5 - 5W;
}
if(contG==2)
{
digitalWrite(D9,HIGH);//OFF - Led Light High Power:Led Cree Q5 - 5W;
}
//-------------------FORWARD--------------------
if(caracter == 'F')
{
digitalWrite(D4,HIGH);
digitalWrite(D5,LOW);
digitalWrite(D6,HIGH);
digitalWrite(D7,LOW);
}
//-------------------BACKWARD-------------------
if(caracter == 'B')
{
digitalWrite(D4,LOW);
digitalWrite(D5,HIGH);
digitalWrite(D6,LOW);
digitalWrite(D7,HIGH);
}
//-------------------LEFT-----------------------
if(caracter == 'L')
{
digitalWrite(D4,HIGH);
digitalWrite(D5,LOW);
digitalWrite(D6,LOW);
digitalWrite(D7,HIGH);
}
//-------------------RIGHT----------------------
if(caracter == 'R')
{
digitalWrite(D4,LOW);
digitalWrite(D5,HIGH);
digitalWrite(D6,HIGH);
digitalWrite(D7,LOW);
}
//-------------------STOP-----------------------
if(caracter == 'S')
{
digitalWrite(D4,LOW);
digitalWrite(D5,LOW);
digitalWrite(D6,LOW);
digitalWrite(D7,LOW);
digitalWrite(AA3,LOW);//Horn
}
//-------------------FORWARD-LEFT-----------------------
if(caracter == 'X')
{
digitalWrite(D4,HIGH);
digitalWrite(D5,LOW);
analogWrite(DriverL,170);//LEFT
digitalWrite(D7,LOW);
}
//-------------------FORWARD-RIGHT-----------------------
if(caracter == 'Y')
{
digitalWrite(D4,HIGH);
analogWrite(DriverR,70);//RIGHT
digitalWrite(D6, HIGH);
digitalWrite(D7,LOW);
}
//-------------------BACK-LEFT-----------------------
if(caracter == 'Z')
{
digitalWrite(D4,LOW);
digitalWrite(D5,HIGH);
analogWrite(DriverL,70);//LEFT
digitalWrite(D7,HIGH);
}
//-------------------BACK-RIGHT-----------------------
if(caracter == 'W')
{
digitalWrite(D4,LOW);
analogWrite(DriverR,170);//RIGHT
digitalWrite(D6,LOW);
digitalWrite(D7,HIGH);
}
//-----------------------------------------------------------
if((caracter == 'g')&&(pos_X <=150))
{
servo1.write(pos_X += 2);
delay(15);
}
if((caracter == 'h')&&(pos_X >=10))
{
servo1.write(pos_X -= 2);
delay(15);
}
if((caracter == 'i')&&(pos_Y <=150))
{
servo2.write(pos_Y += 2);
delay(15);
}
if((caracter == 'j')&&(pos_Y >=10))
{
servo2.write(pos_Y -= 2);
delay(15);
}
delay(10);//10
if(caracter == 'K')
{
//Ultrasonic Sensor HC-SR04: leituta em Cm, pinos D2 e D8;
float cmMsec;
long microsec = ultrasonic.timing();
cmMsec = ultrasonic.convert(microsec, Ultrasonic::CM);
mySerial.println(cmMsec);//Trnasmite o valor da distância para o App.
delay(50);
}
}
5)- Lista de Materiais:
Este material é vendido no Ebay, AliExpress ou Mercado Livre como kit carro robô 2WD para 2 motores, já vem tudo completinho para você montar!
Apenas substituiremos as 4 pilhas AA(6V) pelas de Lipo2S 7,4V/ 2x Ultrafire 18650 7,4V aumentando a Potência dos motores com uma grande autonomia ou durabilidade das baterias.


Motor com faixa vermelha maior redução 205 rpm, caso você queira reduzir ainda mais a velocidade de seu robô deixá-lo super slow, recomendado para movimentos mais precisos e lentos para uso com sensores, Laser e Câmera:
- Velocidade: aproximadamente 205 rpm com roda montada mas sem carga (medido com 5V – velocidade varia com a tensão);



Escolha uma bateria com carregador de sua preferencia:
2 x Bateria 18650 de Lipo Ultrafire 3,7V com suporte e plug P4 total = 7,4V.



Bateria Lipo 2S 7,4V/1000mA/1500mA/2200mA, utilizar com carregador apropriado.

Veja na figura abaixo as 2x Bateria 18650 de Lipo Ultrafire 3,7V com suporte e plug P4 total = 7,4V montadas na parte inferior do Robô:

Lanterna Cree Q 5W- Lanterna de Led 5W :
Esta lanterna é alimentada por uma pilha AA de 1,5V ou bateria de 1,2V recarregável, basta abrir a traseira onde fica o interruptor e liga-la com fios ao módulo relé que fará o acionamento de potência.


Laser Vermelho para Arduino- Este será usado para indicar o ponto para leitura da distância ou para disparo do Laser Verde Burn(opcional):

Laser Verde


Sensor Ultrassônico HC-SR04 - usado para leitura de distâncias em Cm:

Funcionamento:
Para começar a medição é necessário alimentar o módulo e colocar o pino Trigger em nível alto por mais de 10us. Assim o sensor emitirá uma onda sonora que ao encontrar um obstáculo rebaterá de volta em direção ao módulo, sendo que o neste tempo de emissão e recebimento do sinal o pino ECHO ficará em nivel alto. Logo o calcula da distância pode ser feito de acordo com o tempo em que o pino ECHO permaneceu em nível alto após o pino Trigger ter sido colocado em nível alto.
Distância = [Tempo ECHO em nível alto * Velocidade do Som] / 2
A velocidade do som poder ser considerada idealmente igual a 340 m/s, logo o resultado é obtido em metros se considerado o tempo em segundos. Na fórmula a divisão por 2 deve-se ao foto que a onda é enviada e rebatida, logo ela percorre 2 vezes a distância procurada.
O APP. Robot Mira Laser Shoot HC-SR04 e o programa Arduino fazem toda a operação para você!
Especificações:
- Alimentação: 5V DC
- Corrente de Operação: 2mA
- Ângulo de efeito: 15°
- Alcance.: 2cm ~ 4m
- Precisão.: 3mm
Servo Motores MG995 ou similar com Pan Tilt:


. Cada servo é ligado a um canal diferente do Arduino e recebe um sinal no formato PWM ( Pulse Width Modulation ). Este sinal pode ter 0Volts ou 5Volts. O circuito de controle do servo fica monitorando este sinal em intervalos de 20ms ( mili segundos ), se dentro deste intervalo ele percebe uma alteração do sinal de 0v para 5v durante 1ms até 2ms ele altera a posição do seu eixo para coincidir com o sinal que recebeu.

Um sinal de 1ms corresponde a uma posição do braço do servo todo a esquerda ou 0º
Um sinal de 1,5ms é o que chamamos de posição central do servo ou 90º
Um sinal de 2ms corresponde a uma posição do braço do servo todo a direita ou 180º
O APP. Robot Mira Laser Shoot HC-SR04 e o programa Arduino fazem toda a operação para você!

Uma vez que o servo recebe um sinal de 1,5ms ( por exemplo ), ele verifica se o potenciometro encontra-se na posição correspondene, se estiver ele não faz nada. Se o potenciometro nao estiver na posição correspondente ao sinal recebido, o circuito de controle aciona o motor até o potenciometro estar na posição certa. A direção de rotação do motor do servo vai depender também da posição do potenciometro, o motor vai girar na direção que mais rápido levar o potenciometro até a posição certa.
Se tentarmos alterar a posição do braço do servo a força, veremos que ele faz uma resistência e tenta manter a posição que lhe foi designada pelo sinal que recebeu. Ele faz isto por que o potenciometro esta conectado diretamente ao eixo de saida, e detecta qualquer alteração na posição do mesmo. E é isto que faz o servo ser tão importante para nós. Quando mandamos ele ir para uma posição ele vai e fica lá até receber outra "ordem".
Placa Arduino Uno R3:

Ponte H de potência para controle de motor L298N - Serve para motor DC/CC e motor de passo -Ideal para Arduino e PIC

O módulo Driver L298N, usa o chip da ST L298N para controlar 2 motores com tensão 3-30V de corrente contínua (DC), e possui interface de saída de 5V, pode ser controlado por microcontroladores que trabalhem com 5V ou 3,3V sem problemas, você pode controlar facilmente a velocidade e a direção dos motores, você pode controlar um motor de passo de 2 polós, ideal para controle de carrinhos e outros.
O APP. Robot Mira Laser Shoot HC-SR04 e o programa Arduino fazem toda a operação para você!
O APP. Robot Mira Laser Shoot HC-SR04 e o programa Arduino fazem toda a operação para você!
Características:
- Chip Driver: Chip dupla ponte H L298N
- Tensão de alimentação: +5 V ~ +35 V
- Pico de corrente de Saída: 2A por porta (Motor)
- Tensão dos terminais de controle: 4.5~5.5 V
- Corrente dos terminais de controle: 0~36mA
- Tensão por nível lógico: Nível alto 4.5~5.5V e 0V para nível baixo
- Potência máxima: 20W
- Temperatura de trabalho: -25ºC ~ +130ºC
- Outras características: Indicador de direção, indicador de Ligado, proteção contra sobre corrente.

Leds de alto brilho Coloridos para representar os acionamentos das saídas Arduino.

Resistores de 220 ohms para interligar com os leds para as saídas Arduino.

Placa Módulo Bluetooth JY-MCU:


Como funciona o Bluetooth?
O sistema utiliza uma freqüência de rádio de onda curta (2.4 GHz) para criar uma comunicação entre aparelhos habilitados. Como seu alcance é curto e só permite a comunicação entre dispositivos próximos, seu consumo de energia é bem baixo.
O APP. Robot Mira Laser Shoot HC-SR04 e o programa Arduino fazem toda a operação para você!
O APP. Robot Mira Laser Shoot HC-SR04 e o programa Arduino fazem toda a operação para você!
A comunicação do Bluetooth se dá através de uma rede chamada piconet, que só permite a conexão de até oito dispositivos. Porém, para aumentar essa quantidade, é possível sobrepor mais piconets, capacitando o aumento de conexões pelo método chamado de scatternet.
A configuração do módulo bluetooth se dá por uma série de comandos AT, que vamos enviar pelo serial monitor.
O serial monitor se conecta ao Arduino via porta serial, que por sua vez se conecta ao módulo bluetooth por uma segunda porta (pinos 12 e 13), que chamaremos de MinhaSerial. Essa nova serial foi criada utilizando-se a biblioteca SoftwareSerial, uma biblioteca que permite que você defina outras portas do Arduino como RX e TX.
Bluetooth é um protocolo padrão de comunicação primariamente projetado para baixo consumo de energia com baixo alcance, (dependendo da potência: 1 metro, 10 metros, 100 metros) baseado em microchips transmissores de baixo custo em cada dispositivo.
O Bluetooth possibilita a comunicação desses dispositivos uns com os outros quando estão dentro do raio de alcance. Os dispositivos usam um sistema de comunicação via rádio, por isso não necessitam estar na linha de visão um do outro, e podem estar até em outros ambientes, contanto que a transmissão recebida seja suficientemente potente.
| Classe | Potência máxima permitida | Alcance (Aproximadamente) |
|---|---|---|
| Classe 1 | 100 mW (20 dBm) | até 100 metros |
| Classe 2 | 2.5 mW (4 dBm) | até 10 metros |
| Classe 3 | 1 mW (0 dBm) | ~ 1 metro |
Exemplo de módulos de relés se necessário para acionamentos de dispositivos de potência como Lazer, Farol de led Cree Q5, Magnetos e outros.


Exemplo de Protoboard/Breadboard:

Jumpers: Macho Macho, Fêmea Fêmea e Macho Fêmea, conforme sua necessidade:

Cabo USB comunicação para carregar o programa Arduino / Fonte
Alimentação 5V:

Robot Mira Laser Shoot HC-SR04
Nenhum comentário:
Postar um comentário